Keevitusrobotite seeria


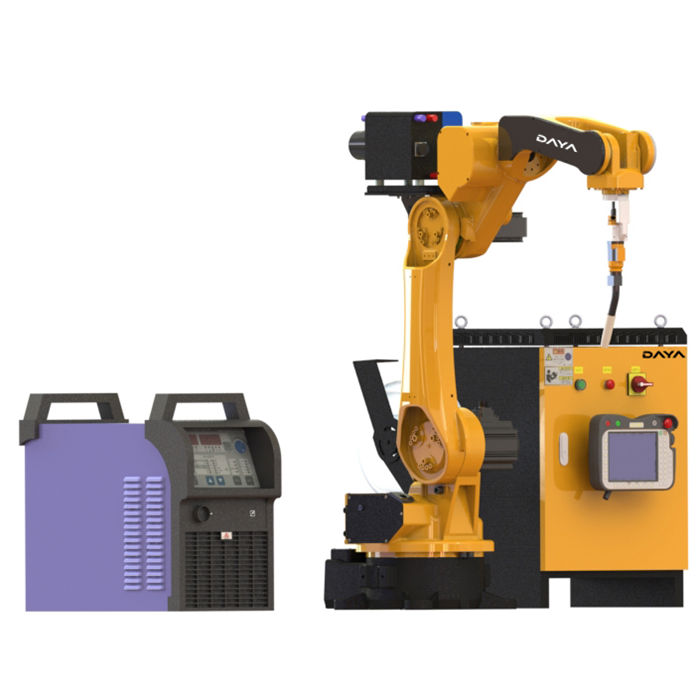

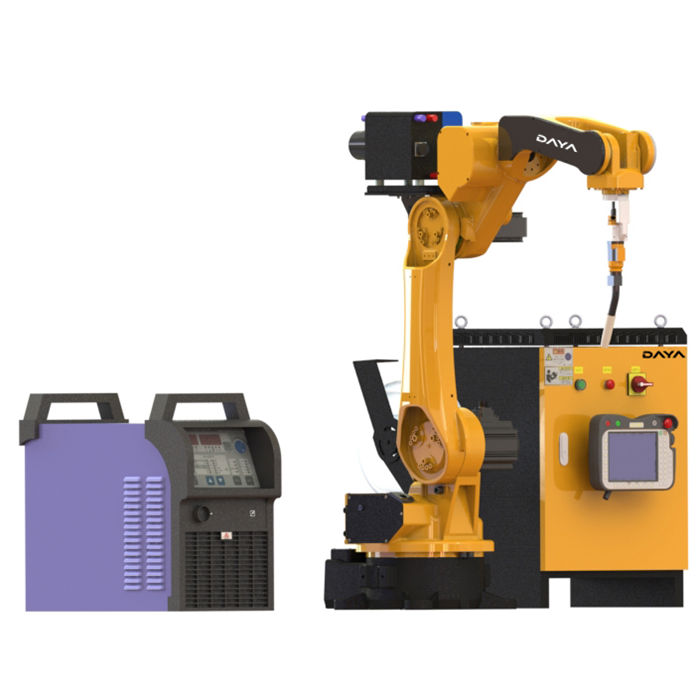
Keevitusrobot

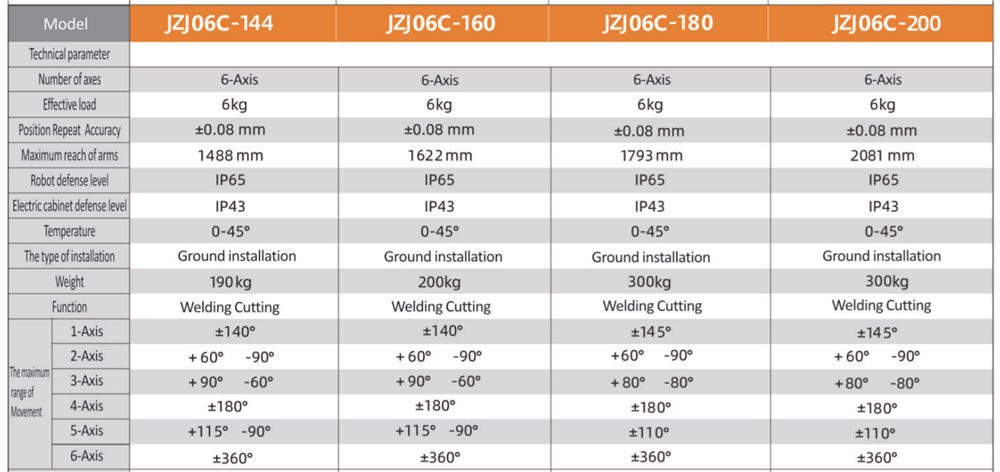
Keevitusroboti seeria JZJ06C-180
Keevitusroboti seeria JZJ06C-144

Keevitusroboti seeria JZJ06C-160

Keevitusroboti seeria JZJ06C-200
Lühike sissejuhatus
Keevitusrobot on tööstusrobot, mis tegeleb keevitamisega (sealhulgas lõikamine ja pihustamine). Rahvusvahelise standardimisorganisatsiooni (ISO) definitsiooni kohaselt, et tööstusrobot kuulub standardsesse keevitusrobotisse, on tööstusrobot mitmeotstarbeline, korratav programmeeritav kolme või enama teljega teljega manipulaator, mida kasutatakse tööstusautomaatika valdkonnas. Erinevate rakendustega kohanemiseks on roboti viimase telje mehaaniliseks liideseks tavaliselt ühendusäärik, mida saab ühendada erinevate tööriistade või lõppefaktoritega. Keevitusrobot on tööstusroboti otsavõlli äärikule paigaldada keevitustangid või keevituspüstol, et see saaks keevitada, lõigata või termiliselt pihustada.
Robotkeevitus on mehhaniseeritud programmeeritavate tööriistade (robotite) kasutamine, mis automatiseerivad keevitusprotsessi täielikult nii keevitamise kui ka detaili käsitsemise abil. Sellised protsessid nagu gaasiga metallist kaarkeevitamine on sageli automatiseeritud, kuid ei pruugi olla samaväärsed roboti keevitamisega, kuna mõnikord valmistab keevitatavad materjalid ette inimene. Robotkeevitust kasutatakse tavaliselt takistuspunkti keevitamiseks ja kaarkeevitamiseks kõrgetasemelistes rakendustes, näiteks autotööstuses.
Robotkeevitus on robootika suhteliselt uus rakendus, kuigi robotid võeti USA tööstusse esmakordselt kasutusele 1960. aastatel. Robotite kasutamine keevitamisel sai alguse alles 1980. aastatel, kui autotööstus hakkas roboteid kohapeal keevitamiseks laialdaselt kasutama. Sellest ajast alates on nii tööstuses kasutatavate robotite kui ka nende rakenduste arv kõvasti kasvanud. 2005. aastal oli Põhja-Ameerika tööstuses kasutusel üle 120 000 roboti, neist umbes pooled keevitamiseks. [1] Kasvu piiravad eelkõige kõrged seadmekulud ja sellest tulenev piirang kõrge tootmisega seotud rakendustele.
Roboti kaarkeevitamine on hakanud kiiresti kasvama ja see juhib juba umbes 20% tööstuslikest robotirakendustest. Kaarkeevitusrobotite põhikomponendid on manipulaator või mehaaniline seade ja kontroller, mis toimivad roboti "ajuna". Manipulaator on see, mis paneb roboti liikuma ja nende süsteemide kujunduse saab liigitada mitmeks levinud tüübiks, näiteks SCARA ja ristkülikukujuliste koordinaatide robot, mis kasutavad masina käte suunamiseks erinevaid koordinaatsüsteeme.
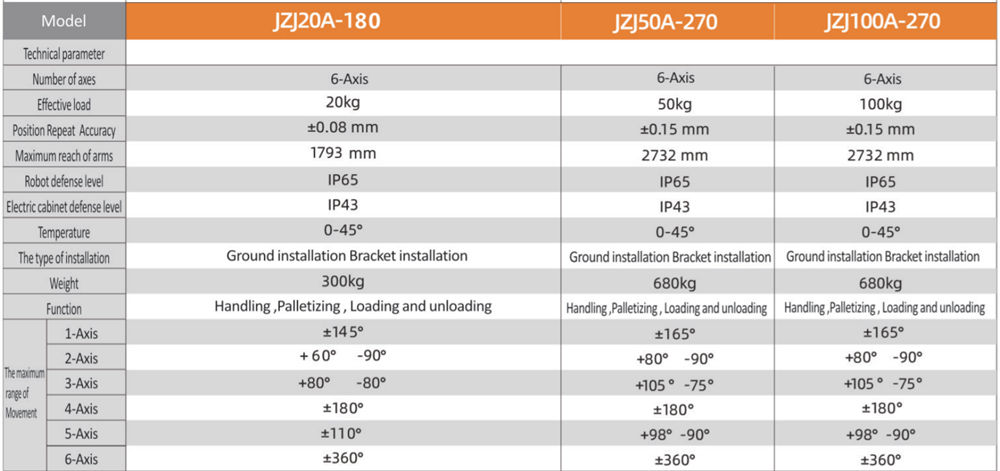
Keevitusrobotite seeria tehnilised parameetrid